



- 您当前的位置是:首页 >机器人与智能制造高职 > 工业机器人本体与应用工作站
- 工业机器人本体与应用工作站
-

-
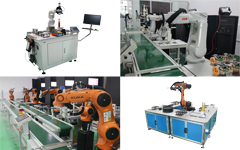
工业机器人分拣、插件与视觉检测工作站
产品型号:Rbt3400
Rbt3400分拣、插件与检测工业机器人工作站平台采用导轨式铝合金,平台上安装6自由度工业机器人,配置送料、加工、装配、输送、贴标、烧录等工作单元,构成一个小型自动生产系统。系统各机构采用气动驱动、运动控制卡和步进电机控制等技术。系统每一工作单元由一台工控机承担其控制任务,辅以 PLC 或机器人扩展IO单元完成周边设备的控制任务,各系统之间通过PCI插槽式运动控制卡及以太网通讯方式实现互连的分布式控制。平台综合应用了多种技术与知识,如机器人控制系统、机器视觉系统、气动控制技术、机械技术(机械传动、机械连接等)、传感器应用技术、PLC 控制和组网、步进电机控制技术和变频器技术等。
- 详细内容
-
产品特点
◆平台系统软件可以完全工作在全自动模式下,无需人工参与,大大提高了设备的智能化程度。自带其他辅助设备单独控制功能,方便调试和关键参数恢复到出厂设置,同时设置了管理员密码;
◆结合视觉算法和双目视觉3D物体构造,分拣抓取精度和插件定位精度可达到0.02mm;
◆系统软件采用自定义模板匹配功能,大大提高了产品的适用场合,并具备单步模式和循环工作模式,有利于单件和批量生产。
应用领域
◆工业机器人分拣、插件及视觉编程教学实训;
◆工业机器人自动分拣(电子行业、食品行业);
◆工业机器人自动装箱及插件(电子行业、食品行业、汽车行业等)。
系统组成及技术参数
◆六自由度工业机器人本体,标配为ABB工业机器人本体(可选KUKA、FANUC、三菱、安川等);
◆自动视觉系统及开发软件;
◆自动分拣装置(气动控制);
◆自动插件装置;
◆双目视觉系统,视觉接口包含1000M网卡和USB方式,可以进行3D视觉项目开发;
◆机器视觉兼容NI Vision Builder for Automated Inspection、Vision Acquisition Software、HALCON等视觉开发环境;
◆案例开发环境包括QT/VS2010/HALCON等;
◆整个平台采用立式结构,可内置工控机,平台立柱安装键盘、显示器支架;
◆气源工作压力:最小6bar,最大 8bar。
实训项目
◆基于工业机器人的全自动分拣设计案例;
◆基于工业机器人的全自动插件设计案例;
◆基于工业机器人的全自动码垛设计案例;
◆提供NI Vision Builder for Automated Inspection、Vision Acquisition Software、HALCON 编写的视觉算法案例程序,主要包括模板匹配、零件识别、字符识别、条码识别、二维码识别等。
- 上一篇:工业机器人抛光、打磨与去毛刺工作站
- 下一篇:工业机器人自动装配与视觉检测工作站
