



- 您当前的位置是:首页 >人工智能产品 > 人工智能计算与数据平台
- 人工智能计算与数据平台
-

-
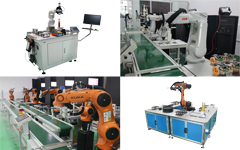
多机协同机器人系统eAI8090
产品型号:eAI8090
多机协同机器人系统由3台不同机器人协同作业,构成一个工业化智能加工系统,如智能装配与检测系统、智能分拣与装箱系统及开展相关科研工作等。
- 详细内容
-
多机协同机器人系统由3台不同机器人协同作业,构成一个工业化智能加工系统,如智能装配与检测系统、智能分拣与装箱系统及开展相关科研工作等。
整机参数
协作机器人:6自由度,负载5kg,臂展800mm,重复精度0.1mm;
机器人控制器:轻巧型控制箱,移动、搬运便捷;
编程接口:C++、Python、ROS;
运动方式:关节运动、直线运动、直线圆弧运动、servoj运动;
快换装置: 1拖3快换模块,支持多种末端工具;
开源智能视觉检测系统:主要是配合工业机器人做智能检测工件角度缺陷及自动对位,以及工业机器人视觉学习开发使用;
协调套件:双臂协同装配组件,自动拧螺丝装配系统组件,自动分拣插件组件,双目3D视觉组件,写字绘图工具;
PLC及电气控制系统:国际知名品牌PLC,集成16路输入和16路输出IO口,内置业界最高水平的高速处理0.065μS/基本指令;
触摸屏:7英寸;
自动夹爪:气动驱动,工业环境设计,高可靠性;
计算机视觉开源案例:视觉定位,视觉测量,视觉识别,视觉检测。
ROS开源案例
Moveit!图形控制界面控制机械臂运动;
基于ROS关节空间和笛卡尔空间运动指令使用;
基于ROS工具 I/O 操作;基于ROS气动爪手控制;
基于ROS搬运案例; 基于ROS自动装配案例;
基于ROS智能视觉分拣案例基于Python/C++开发案例:
关节运动、直线运动、圆弧直线运动、圆与圆弧运动案例;
MODBUS-TCP通讯案例;软笔写字案例;绘图案例;
搬运码垛案例;自动装配案例;智能分拣案例;协同装配案例;
图形化编程案例:关节运动、直线运动、圆弧直线运动、
圆与圆弧运动案例;绘图案例;搬运码垛案例;自动分拣案例。
计算机视觉开源案例:视觉定位,视觉测量,视觉识别,视觉检测。
- 上一篇:人工智能计算与数据系统平台
